Oscillations and Waves: Winter-2026
HW 2a (SOLUTION): Due W2 D3
- Inhomogeneous Linear ODEs with Constant Coefficients (First Example)
S1 5477S
Inhomogeneous, linear ODEs with constant coefficients are among the most straigtforward to solve, although the algebra can get messy. This content should have been covered in your Differential Equations course (MTH 256 or equiv.). If you need a review, please see: The Method for Inhomogeneous Equations or your differential equations text.
The general solution of the homogeneous differential equation
\[\ddot{x}-\dot{x}-6 x=0\]
is
\[x(t)=A\, e^{3t}+ B\, e^{-2t}\]
where \(A\) and \(B\) are arbitrary constants that would be determined by the initial conditions of the problem.
Find a particular solution of the inhomogeneous differential equation \(\ddot{x}-\dot{x}-6 x=-25\sin(4 t)\).
I will guess a solution that has the form of the inhomogeneous function, plus all of its derivatives: \(x_{p}\left(t\right) = G\sin(4t) + H\cos(4t)\). Plugging this into the original equation allows us to solve for G and H. \begin{equation*} -16G\sin(4t)-16H\cos(4t)-4G\cos(4t)+4H\sin(4t)-6G\sin(4t)-6H\cos(4t) = -25\sin(4t) \end{equation*} I can then make a sytem of equations by separating the sine and cosine parts: \begin{align*} -16G+4H-6G=-25\\ -16H-4G-6H=0\\ \end{align*} Use your favorite linear algebra techniques to solve this system: \begin{align*} G=\frac{11}{10}\\ H=-\frac{1}{5}\\ \end{align*} Returning to the original assumption gives the particular solution: \begin{equation*} x_{p}(t) = \frac{11}{10}\sin(4t)-\frac{1}{5}\cos(4t) \end{equation*}
Find the general solution of \(\ddot{x}-\dot{x}-6 x=-25\sin(4 t)\).
Once I have the particular solution, I can simply add it to the general solution to the homogeneous equation, which was given in the statment of the problem: \begin{equation*} x_{p}(t) = Ae^{3t} + Be^{-2t} +\frac{11}{10}\sin(4t)-\frac{1}{5}\cos(4t) \end{equation*}
Some terms in your general solution have an undetermined coefficients, while some coefficients are fully determined. Explain what is different about these two cases.
The general solution to the homogeneous equation, which is part of the general solution to the inhomogeneous equation, has two underdetermined coefficients. This is because if you plug any multiple of a solution into the homogeneous equation, the multiplicative factor appears once in every term, and so factors out. On the other hand, the particular solution of the inhomogeneous equation has to have a fixed coefficient. If you try plugging a multiple of this solution into the INHOMOGENEOUS differential equation, the multiplicative factor does NOT appear in the inhomogeneous term. Try it!
Find a particular solution of \(\ddot{x}-\dot{x}-6 x=12 e^{-3 t}\)
I will again guess a solution that has the form of the inhomogeneous function (this time, there are no extra derivative terms to include): \begin{equation*} x_p(t)=Je^{-3t}. \end{equation*} Plugging \(x_p\) into the original equation allows us to solve for \(J\). \begin{align*} 9Je^{-3t}+3Je^{-3t}-6Je^{-3t}&=12e^{-3t}\\ \big(9J+3J-6J\big)e^{-3t}&=12e^{-3t}\\ 6J&=12\\ J&=2. \end{align*} This gives the particular solution \(x_p(t)=2e^{-3t}\). Note that this is a different particular solution that in part (a). When the inhomogeneous term is changed, the particular solution will always change as well.
Find the general solution of \(\ddot{x}-\dot{x}-6 x=12 e^{-3 t}-25\sin(4 t)\)
How is this general solution related to the particular solutions you found in the previous parts of this question?
Can you add these particular solutions together with arbitrary coefficients to get a new particular solution?
I could solve this problem from scratch by another ansatz: the solution will have the form of the inhomogeneous function and its derivatives, but this will lead to redoing all the work I did in previous parts of the problem! When the inhomogeneous function can be split into a sum of two other functions for which the particular solution is known, the particular solution of the full equation is the sum of those individual particular solutions (see section 6.5 of the Linear Algebra book for more detail about this property). Adding together our particular solutions from the previous parts of the problem gives \begin{equation*} x_p(t)=\frac{11}{10}\sin(4t)-\frac{1}{5}\cos(4t)+2e^{-3t}. \end{equation*} Lastly, I add the general solution to the homogeneous equation to get \begin{equation*} x(t)=Ae^{3t}+Be^{-2t}+\frac{11}{10}\sin(4t)-\frac{1}{5}\cos(4t)+2e^{-3t}. \end{equation*} As noted in part (c), you cannot add the particular solutions in any arbitrary combination --- their coefficients were fully determined as part of evaluating the individual particular solutions. I can try this and see what happens with something like \begin{equation*} x_s(t)=M\left[\frac{11}{10}\sin(4t)-\frac{1}{5}\cos(4t)+2e^{-3t}\right]+N\bigg[2e^{-3t}\bigg]. \end{equation*} I can plug \(x_s\) into the left-hand side of \(\ddot{x}-\dot{x}-6x=12e^{-3t}-25\sin(4t)\) and use our results from parts (a) and (d) to simplify to \begin{align*} \ddot{x}_s-\dot{x}_s-6x_s&=12e^{-3t}-25\sin(4t)\\ M\Big[-25\sin(4t)\Big]+N\Big[12e^{-3t}\Big]&=12e^{-3t}-25\sin(4t). \end{align*} Unsurprisingly, this equation is not true for most values of \(M\) and \(N\); only \(M=1\) and \(N=1\) give a valid equation, thus \(x_s\) is only the correct particular solution for those values, and not for arbitrary ones.
Sense-making: Check your answer; Explicitly plug in your final answer in part (e) and check that it satisfies the differential equation.
\begin{align*} 6x(t)&=6Ae^{3t}+6Be^{-2t}+\frac{66}{10}\sin(4t)-\frac{12}{10}\cos(4t)+12e^{-3t} \\ \dot x(t) &= 3Ae^{3t} - 2Be^{-2t} + \frac{44}{10}\cos(4t)+\frac{8}{10}\sin(4t) - 6e^{-3t} \\ \ddot x(t) &= 9Ae^{3t} + 4Be^{-2t} - \frac{176}{10}\sin(4t) + \frac{32}{10}\cos(4t) + 18e^{-3t} \\ \ddot x(t) - \dot x(t) &= 6Ae^{3t} + 6Be^{-2t} - \frac{184}{10}\sin(4t) - \frac{12}{10}\cos(4t) + 24e^{-3t} \\ \ddot{x}-\dot{x}-6 x&=12 e^{-3 t}-25\sin(4 t) \end{align*}
- Shifted Sinusoids
S1 5477S
A fun and fascinating fact about sinusoids is that a (normalized) sum of a cosine and a sine function is just a shifted cosine function. You can see this relationship geometrically using the Geogebra applet in https://books.physics.oregonstate.edu/GMM/fourierggb.html. Below is an algebraic proof:
For \(a\) and \(b\) related by the normalization condition \(a^2+b^2=1\), we have \begin{align} a\cos\theta+b\sin\theta &=a\, \frac{e^{i\theta}+e^{-i\theta}}{2} +b\, \frac{e^{i\theta}-e^{-i\theta}}{2i}\\ &=\frac{a-ib}{2}\, e^{i\theta} + \frac{a+ib}{2}\, e^{-i\theta}\\ &=\frac{1}{2} e^{-i\phi}\, e^{i\theta} + \frac{1}{2} e^{i\phi}\, e^{-i\theta}\\ &=\frac{1}{2} e^{i(\theta-\phi)} + \frac{1}{2} e^{-i(\theta-\phi)}\\ &=\cos(\theta-\phi) \end{align} where in (1) we have used Euler's formula, in (2) we have regrouped terms, in (3) we have rewritten \(a+ib=e^{i\phi}\), in (4) we have combined exponents, and in (5) we have used the inverse form of Euler's formulas.
In the rest of this class, we will discuss 4 different forms of the solutions of the equation of motion for a simple harmonic oscillator: \begin{align*} \mbox{A Form: } x(t) &= A\cos(\omega t + \phi) \\[12pt] \mbox{B Form: } x(t) &= B_1\cos(\omega t) + B_2\sin(\omega t)\\[12pt] \mbox{C Form: } x(t) &= Ce^{i\omega t} + C^*e^{-i\omega t}\\[12pt] \mbox{D Form: } x(t) &= Re[De^{i\omega t}] \end{align*}
- In the calculation above, identify lines of the calculation that represent the A, B, and C forms.
- A-form: Line (5)
- B-form: Line (1)
- C-Form: Lines (1-4)
- From your identifications, find relationships between the constants in the A, B, and C forms.
For the B-form use a trig identity to reorganize the \(A\) form:
\[\cos(\alpha + \beta) = \cos\alpha \cos\beta - \sin\alpha \sin\beta\]
\begin{align*} x(t) &= A \cos(\omega_0 t + \phi) \\ &= A\cos(\omega_0 t)\cos\phi -A\sin(\omega_0t)\sin\phi \\ \end{align*} Recognize that the last line looks like the B-form identifying the terms in the last line as \(B_1\) and \(B_2\). \begin{align*} x(t) &= \underbrace{A\cos\phi}_{B_1}\cos(\omega_0 t) +\underbrace{-A\sin\phi}_{B_2}\sin(\omega_0t) \\ \end{align*}
For C-form, rewrite \(\sin\) and \(\cos\) in terms of complex exponentials:
\[\sin\theta = \frac{e^{i\theta} - e^{-i\theta}}{2i}\] \[\cos\theta = \frac{e^{i\theta} + e^{-i\theta}}{2}\]
\begin{align*} x(t) &= A\cos(\omega_0 t)\cos\phi -A\sin(\omega_0t)\sin\phi \\[12pt] &= A\cos\phi \left[\frac{e^{i\omega_0 t}+e^{-i\omega_0 t}}{2}\right] - A\sin\phi \left[\frac{e^{i\omega_0 t}-e^{-i\omega_0 t}}{2i}\right] \\[12pt] &= A\cos\phi \left[\frac{e^{i\omega_0 t}+e^{-i\omega_0 t}}{2}\right] + iA\sin\phi \left[\frac{e^{i\omega_0 t}-e^{-i\omega_0 t}}{2}\right] \\[12pt] &= \tfrac{A}{2}\left[\cos\phi + i\sin\phi \right] e^{i\omega_0 t} + \tfrac{A}{2}\left[\cos\phi - i\sin\phi \right] e^{-i\omega_0 t} \\[12pt] &= \underbrace{\tfrac{A}{2}e^{i\phi}}_{C}\; e^{i\omega_0 t} + \underbrace{\tfrac{A}{2}e^{-i\phi}}_{C^*}\; e^{-i\omega_0 t} \end{align*}
Therefore, \(|C| = A/2\) (remember, \(A\) is real), and \(\phi\) is the phase of the complex number \(C\).
Alternatively, \(Re(C) = \frac{A}{2} \cos \phi\) and \(Im(C) = \frac{A}{2} \sin \phi\)
- In the calculation above, identify lines of the calculation that represent the A, B, and C forms.
- A Physical System that Oscillates
S1 5477S
A mass \(m\) is strung on a very light wire equidistant between two anchor points separated by a distance \(2L\). When the mass is displaced laterally (i.e. plucked) in the \(x\)-direction (here vertically), there is constant tension \(T\) on the wire that produces a restoring force.
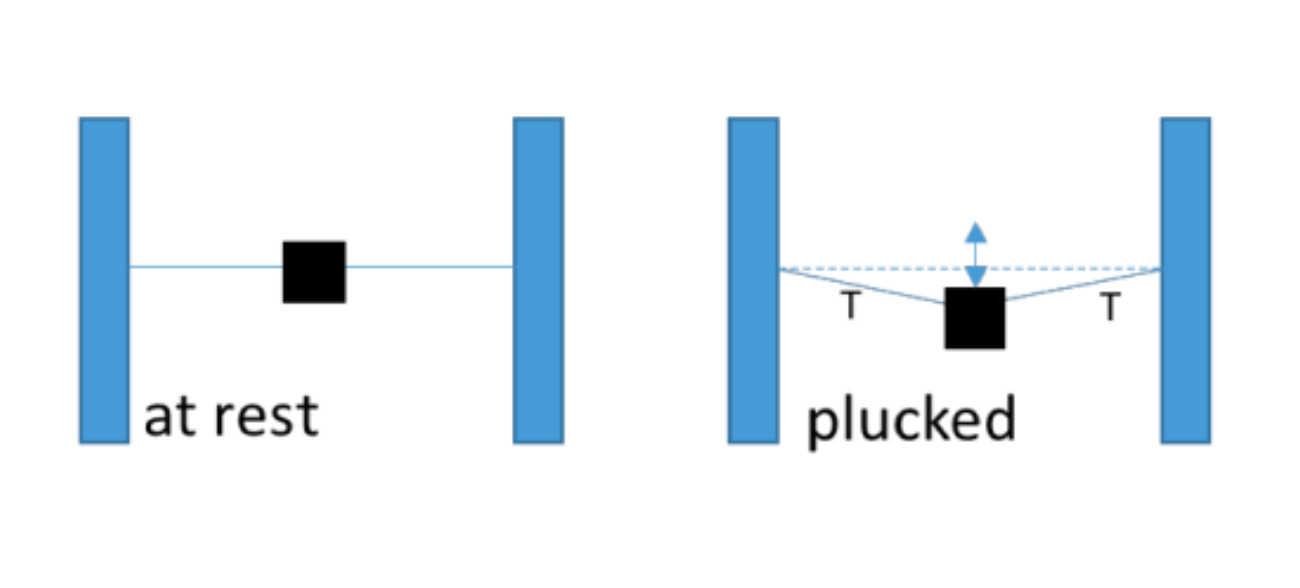
What is the resulting natural frequency \(\omega_0\) of the oscillating mass? Assume tension drives the oscillation (i.e. no gravity, if it helps pretend you are looking down at a mass resting on a frictionless surface) and assume the angle the string makes with the posts is small.
Note: \(\omega_0\) must be expressed in terms of the physical parameters given in the problem (\(T, L, m\)).
- Write a generic expression for displacement from equilibrium in any of the standard forms, \(ABCD\).
The goal here is to `make your system look like the mass-spring system'! In other words, try to find the force in the form:
\[F=(minus)(some\,constant)\cdot(displacement)\]
If you can do that, then you can identify \((some\,constant)\) with the spring constant \(k\), and divide it by the known mass \(m\) to find the frequency.
Each wire segment has a tension \(T\) and makes an angle \(\theta\) with its respective anchor point. Therefore, the restoring force for each wire segment is the vertical component of the tension \((T\sin{\theta})\), and the total restoring force (magnitude) is \[|F_{res}|=2T\sin{\theta}\approx 2T\theta\] if the angle is small. Note the correct units. \(T\), the tension, is a force.
The restoring force points upward when the displacement is downwards, and vice versa (it would point downward if the displacement is upwards).
Further, to express everything in terms of \(x\), we note \(x=L\tan\theta\approx L\sin\theta\approx L\theta\) to the same order of approximation.
\[F_{res}\approx -2T\frac{x}{L}\]
if the angle is small, and the negative sign properly accounts for direction.
The restoring force is therefore of the form of Hooke's Law: \(F_{res}\approx-kx\) and the role of \(k\) is played by \(2\frac{T}{L}\)!
Hence, the natural frequency is \(\omega_0=\sqrt{\frac{2T}{mL}}\), where \(m\) is the mass of the mass (naturally), and any mass of the wire is neglected because it is `very light' compared to the mass.
The equation of motion in form \(A\) is:
\[x(t)=A\cos{\left(\sqrt{\frac{2T}{mL}}\,t+\phi\right)}\]
with \(A\) and \(\phi\) determined by the initial conditions.